Liebe Modellbauer und speziell liebe Legofreunde
Guten Tag
Wer als Mindstorms-Fan den Stairclimber baut und diesen dazu bringt, zwei oder mehr Treppenstufen hochzusteigen, hat wirklich einen „Meilenstein“ erreicht.
Wie geht das?
Man baut den Stairclimber nach der Bauanleitung (Download von der Mindstorms-Plattform) zusammen.
Mit der ausgezeichneten Bauanleitung ist es nicht allzu schwierig, diesen Roboter zu bauen. Auf der letzten Seite der Bauanleitung (Nr. 163) findet man einige Abbildungen, wie der Stairclimber die Treppe hochsteigen soll. Die nötige Programmierung ist einem selbst überlassen! Nun kann man einige Stunden damit verbringen dem Stairclimber beizubringen, wie er „Treppensteigen“ soll.
Dazu muss man zuerst verstehen, wie er aufgebaut ist und welche Funktionen zur Verfügung stehen.
Hier einige Erklärungen:
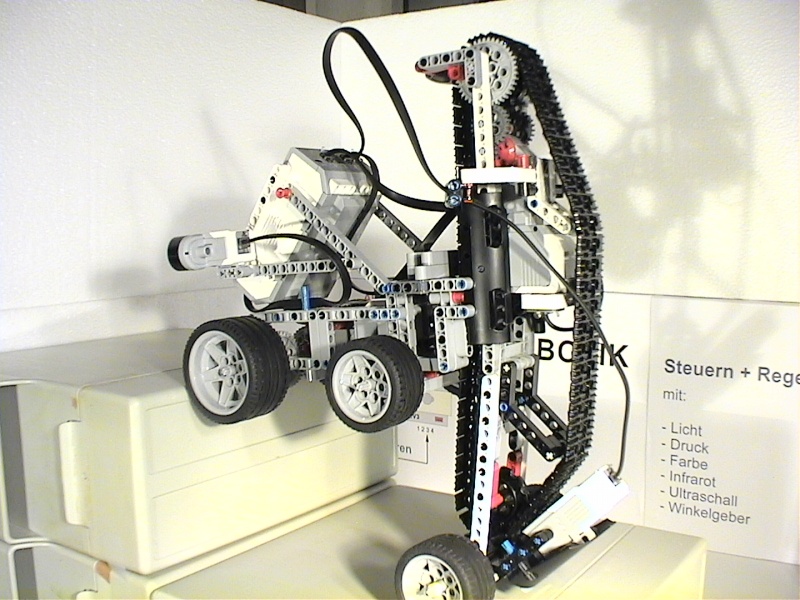
Aufbau
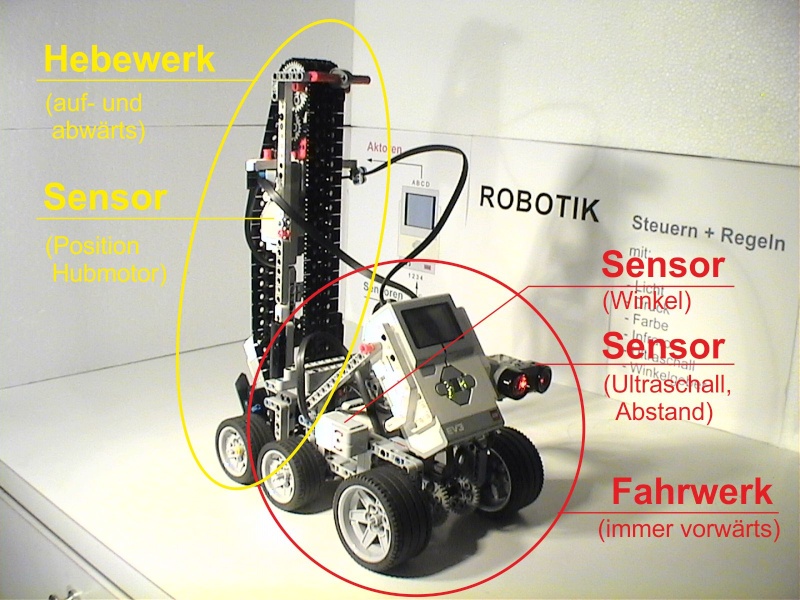
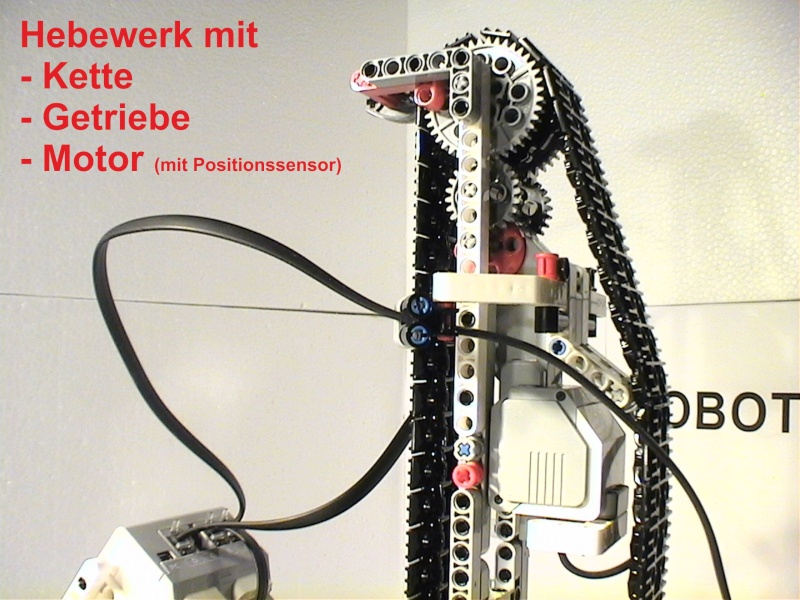
Detail 1

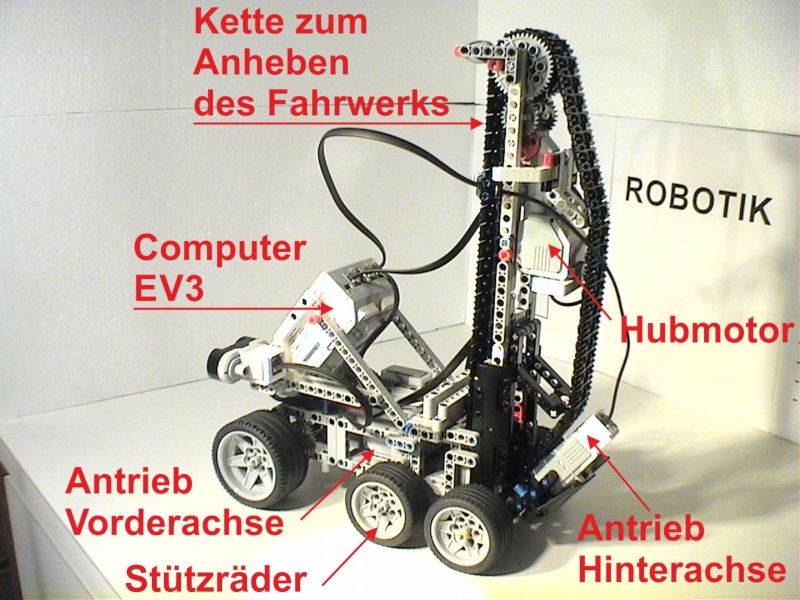
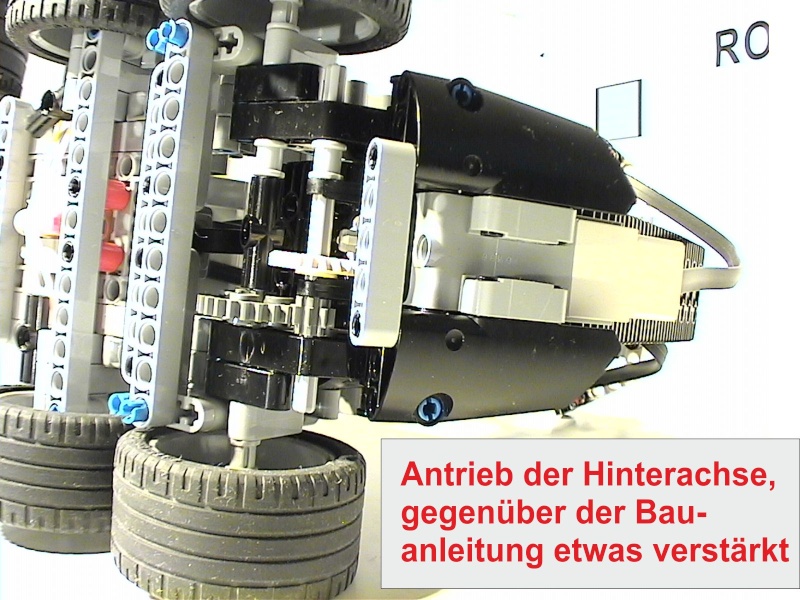
Detail 2
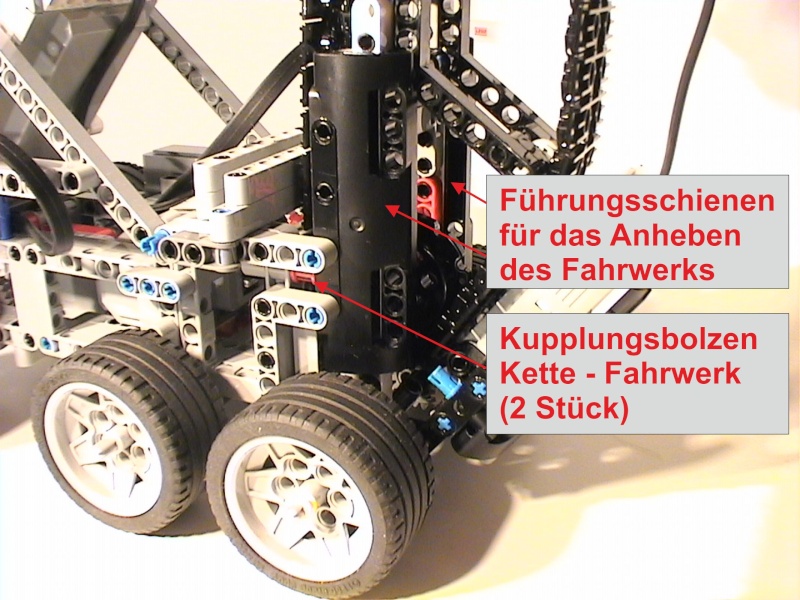
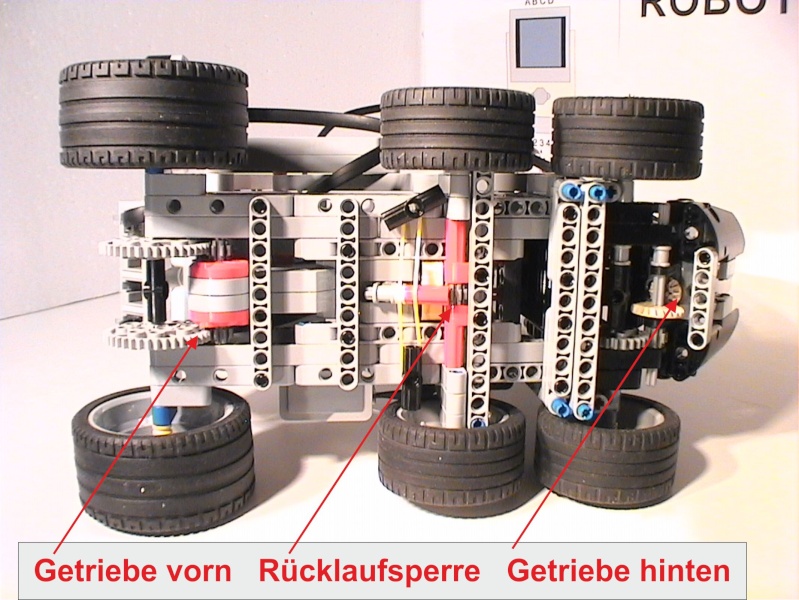
Detail 3
Detail 4
Detail 5
Detail 6
Die Treppenstufen werden in 4 Schritten bewältigt
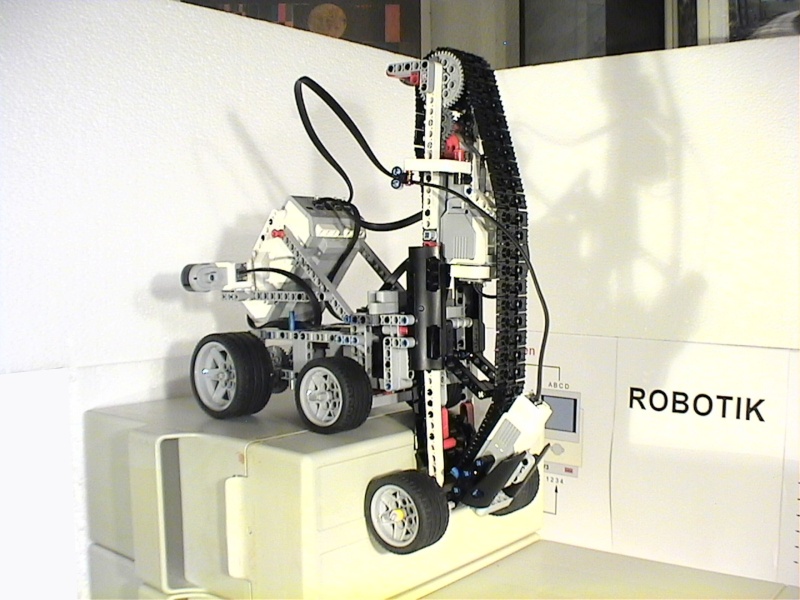
1. Schritt, Anfahren
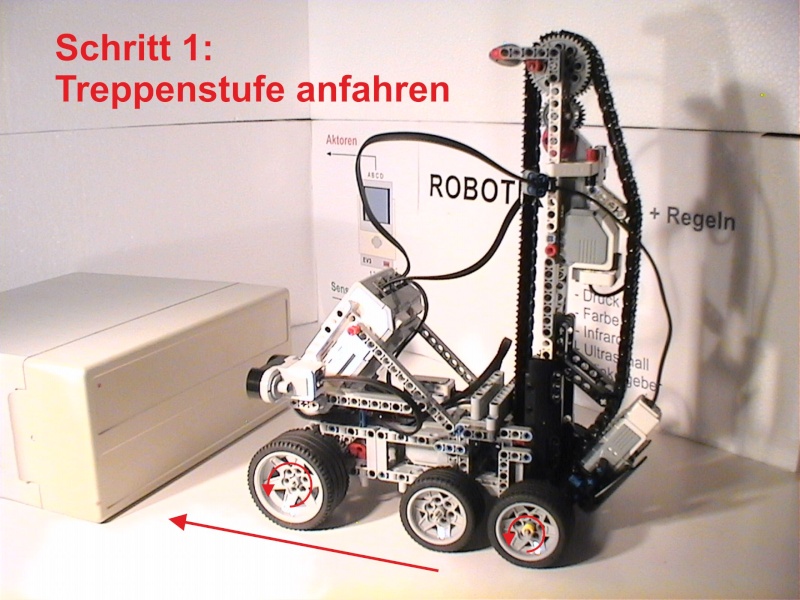
Die Vorder- und Hinterachse werden angetrieben.
Der Stairclimber fährt solange vorwärts, bis er an die Stufenwand stösst. Die Motoren vorn und hinten bleiben im Betrieb und das Fahrwerk stellt sich schräg (vorne höher). Der Winkelgeber schaltet bei 3° den Hubmotor ein. Nun laufen alle 3 Motoren, vorne zum Klettern, hinten um zu verhindern, dass der Roboter nach hinten wegrutscht und der Hubmotor hebt das Fahrwerk entlang der Führungsschienen hoch.
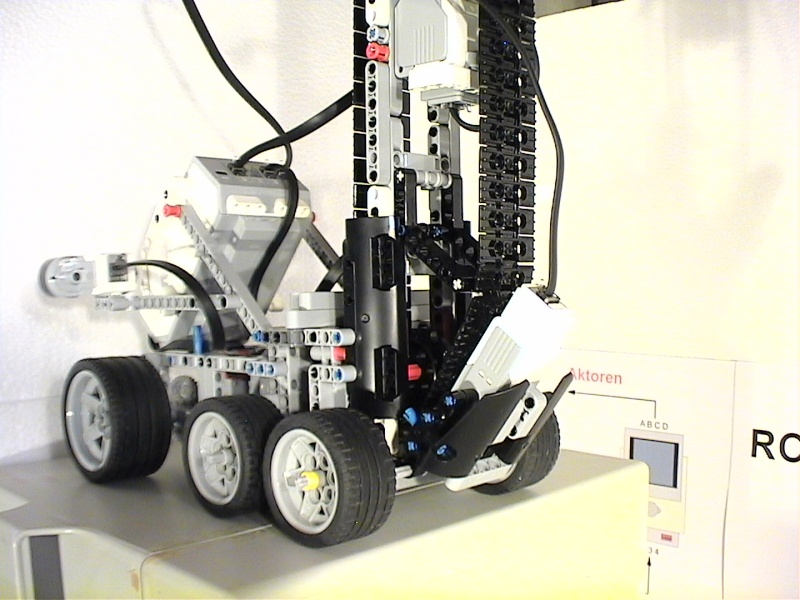
2. Schritt, Fahrwerk anheben
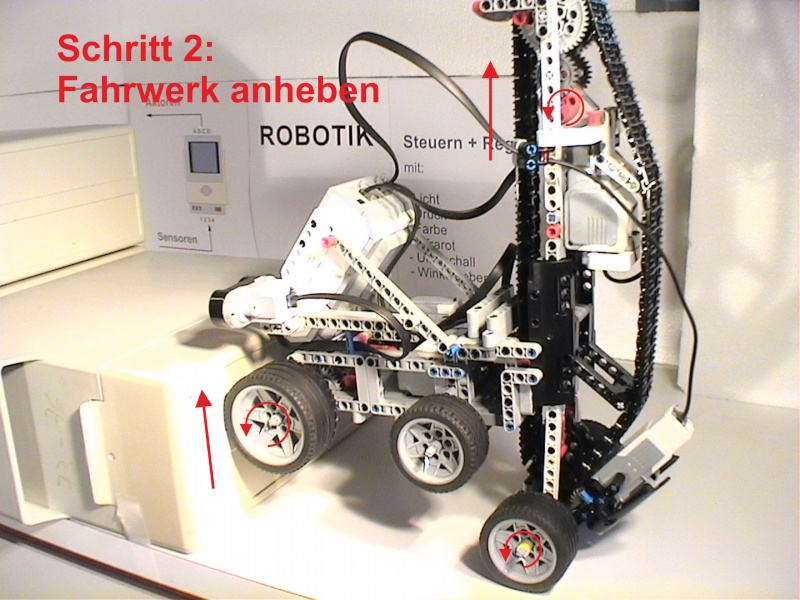
Alle drei Motoren arbeiten. Wenn die Stufenkante erreicht wird, neigt sich das Fahrwerk (hinten höher). Der Winkelgeber stellt das fest und schaltet den Hubmotor ab (Bremse festgezogen). Der Roboter wird von den Achsantrieben auf die Stufe gefahren (Schritt 3).
3. Schritt, auf Stufe fahren
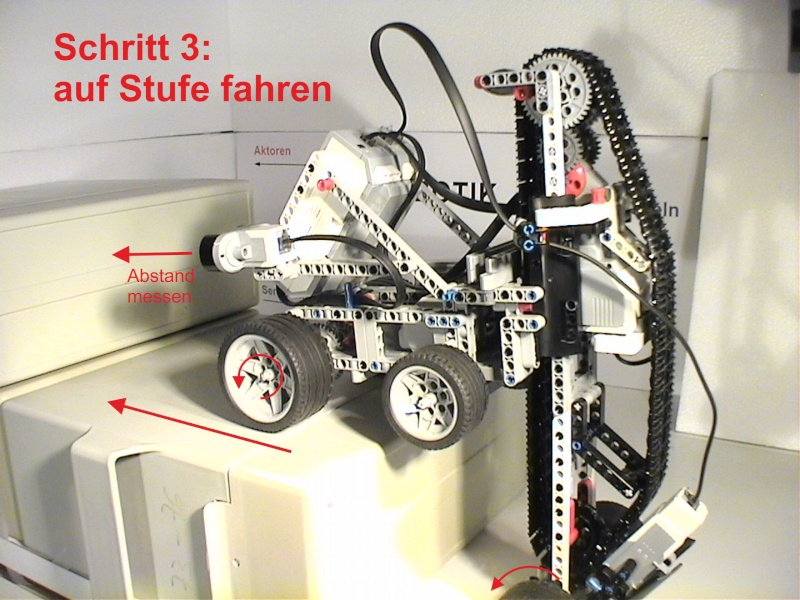
Der Abstand zur nächsten Stufe wird vom Ultraschallsensor gemessen. Wird der eingestellte Wert unterschritten erfolgte die Abschaltung der Achsantriebe und der Roboter hält auf der Stufe an. Der eingestellte Abstand wurde empirisch ermittelt und das bedeutet, dass das Programm individuell auf die vorhandenen, gleichartigen Stufen ausgelegt ist.
4. Schritt, Hebewerk hochfahren
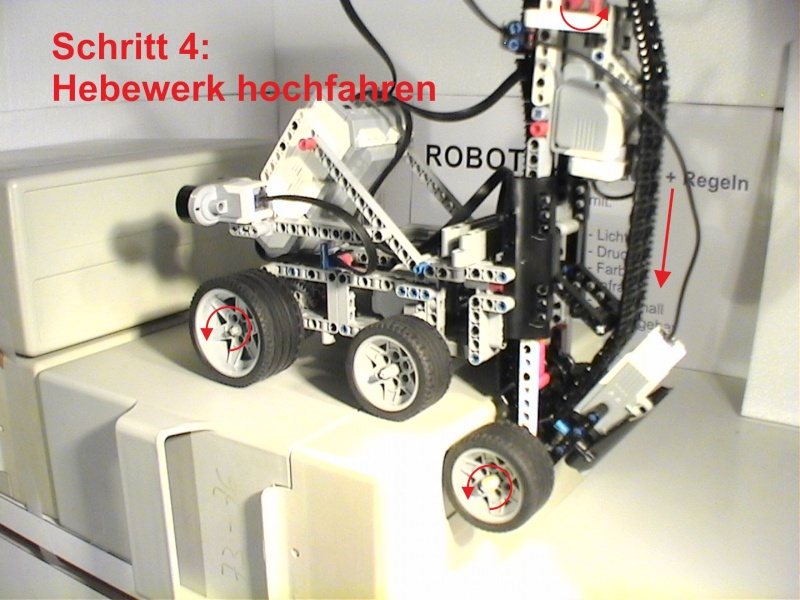
Der Hubmotor läuft solange, bis die Ausgangshöhe (Sensor im Hubmotor) erreicht ist. Die Achsantriebe wurden mit dem Hubmotor wieder eingeschaltet. Dadurch fährt der Roboter beim Erreichen der Schwellenhöhe zur nächsten Stufenwand, d.h. die vier Schritte werden für die nächste Stufe wiederholt.
Nächstes Anheben
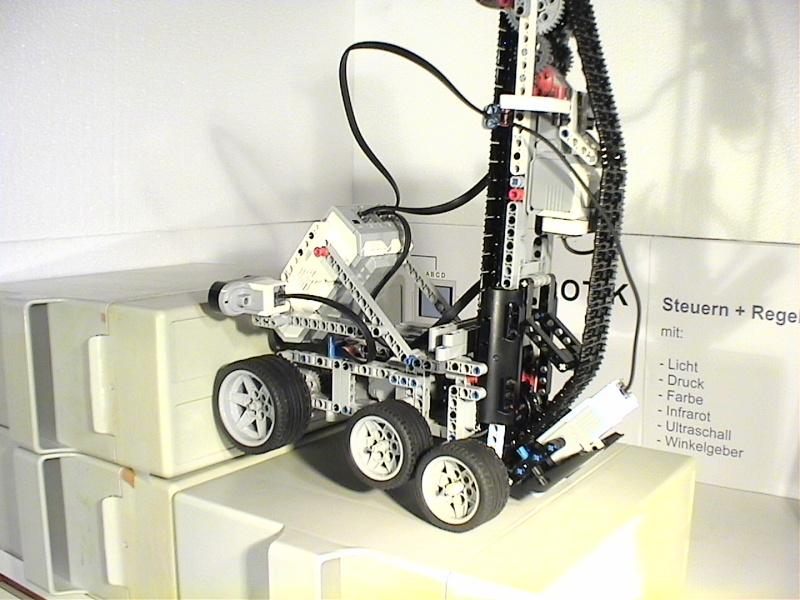
Ende Anheben
Hebewerk wieder hochfahren
Anhalten auf Stufe 2
Erfahrungen
- Das Programm funktioniert nur für die gegebene Situation korrekt.
- Die Wahl der Motorgeschwindigkeiten ist ziemlich diffizil.
- Ein allgemein verwendbares Programm wäre viel aufwändiger.
- Ein allgemein gültiges Programm ist nicht sinnvoll, weil gewisse Bedingungen gar nicht vom Programm erfasst werden können.
- Ändert z.B. die Beschaffenheit der Unterlage für die Räder, ändern auch die Antriebsverhältnisse für diese. Ändert der Ladezustand des Akkus, ändern auch die Bedingungen für die Motoren.
Fazit
- Es ist ein wunderbares Modell zum Lernen und um viele Erfahrungen zu sammeln.
- Ein Dauerbetrieb ist wegen dem grossen Energieverbrauch und der grossen mechanischen Beanspruchung nicht sinnvoll.
- Wenn möglich ein Video aufnehmen zur Erinnerung an den erfolgreichen Betrieb des selber realisierten Stairclimbers.
- Sich freuen, dass man diese Aufgabe gemeistert hat und zu neuen Ufern aufbrechen!
- Also das Modell auseinandernehmen und ein neues, eventuell noch schwierigeres bauen!
Tschüss, bis zum nächsten Mal
Euer alo



