Liebe Modellbauer und ganz speziell liebe Legofreunde
Guten Tag
Kann man sich noch steigern, nachdem man den Schwerlastkran und den Schaufellader von LEGO gebaut hat?
Ja, man kann. Man baut sich Modelle mit LEGO MINDSTORMS Education EV3. Das ist „leider“ noch teurer als die beiden grossen Modelle, dafür bekommt man den Eintritt ins riesige Gebiet der Robotik geschenkt. Man lernt eine Menge über Sensoren und Aktoren, Steuern und Regeln und viele weitere interessante Dinge.
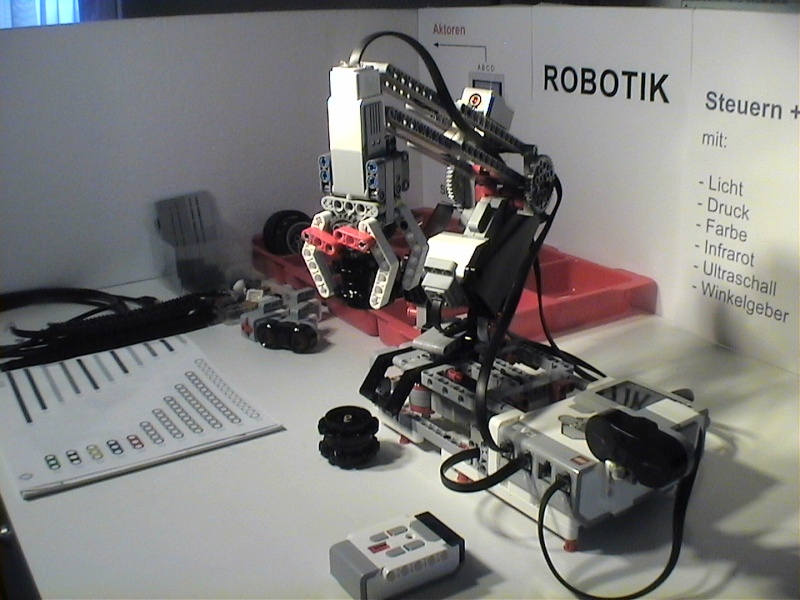
Und so geht das – man baut sich das Basismodell „educator“ mit LEGO MINDSTORMS, in der Fortsetzung einfach „ms“ genannt. Das ist mein Arbeitsplatz, ausgerüstet mit dem Basis Set von „ms“ und einigen weiteren wichtigen Dingen. Das LEGO-Feeling wird besonders gestärkt, weil vor dem Bau eines neuen Modells das alte auseinander genommen werden muss!

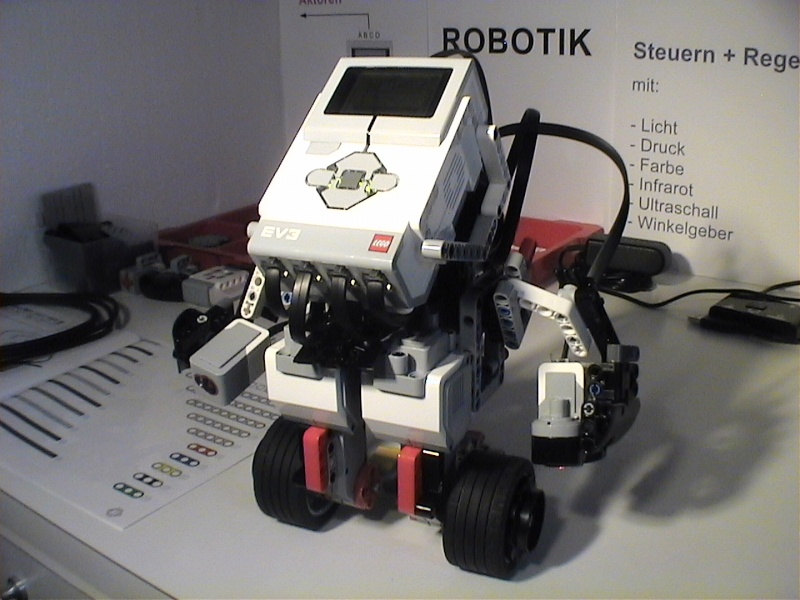
Nun ist der erste Roboter namens „educator“ zusammengebaut. Er hat 2 grosse Motoren, die vom EV3 gesteuert werden.

Die Bauanleitung mit Programmbeschrieb für den „educator“ wird in einem dünnen Büchlein mitgeliefert. Die weiteren Bauanleitungen findet man im Internet auf der „ms“-Plattform. *

Hier ist der „educator“ bereits mit dem Infrarot-Sensor ausgerüstet. *
Fährt der „educator“ auf ein Hindernis zu, werden die Motoren bei Erreichen der programmierten Distanz angehalten. *

So sieht das Teilprogramm auf dem Screen vom EV3 aus. *

Mit dem Kreiselsensor kann man Winkel erfassen und im Programm verarbeiten. *

Jetzt hat der „educator“ einen „Greifer“ bekommen, der durch ein interessantes Umlenkgetriebe betätigt wird. *
Hier ist der „Greifer“ (Umschlinger) als Werkzeug eingesetzt. *

Ein weiterer, wichtiger Sensor ist der Lichtsensor der verschiedene Farben unterscheiden kann. *
Hier sieht er rot! *
Das ist ein Touch-Sensor, Stromer kennen den als „Endschalter“. *

Eine Erklärung zu: …weitere Dinge lernen… Neben der USB-Steckdose kann eine micro SD eingesteckt werden.

Darum braucht man plötzlich einen Kartenleser, kostet nicht viel, bringt aber gigantische Speichererweiterung. Es gibt PC bei denen solche Kartenleser schon eingebaut sind. Ein schöner Nebeneffekt – ich kann nun die Bilder, von der SD der Kamera, viel schneller in den PC einlesen.

Und endlich eine Roboteranwendung. Dank der intelligenten Programmierung fährt der „educator“ selbständig dem Rand der schwarzen Fläche entlang. **

Hier hat der „educator“ die Aufgabe, der schwarzen Kurve nachzufahren. Er kann das recht gut. **

Hier ein Test, ob der „educator“ Farben unterscheiden kann. Es klappt tatsächlich ausgezeichnet. **
 Ein neuer Roboter
Ein neuer Roboter
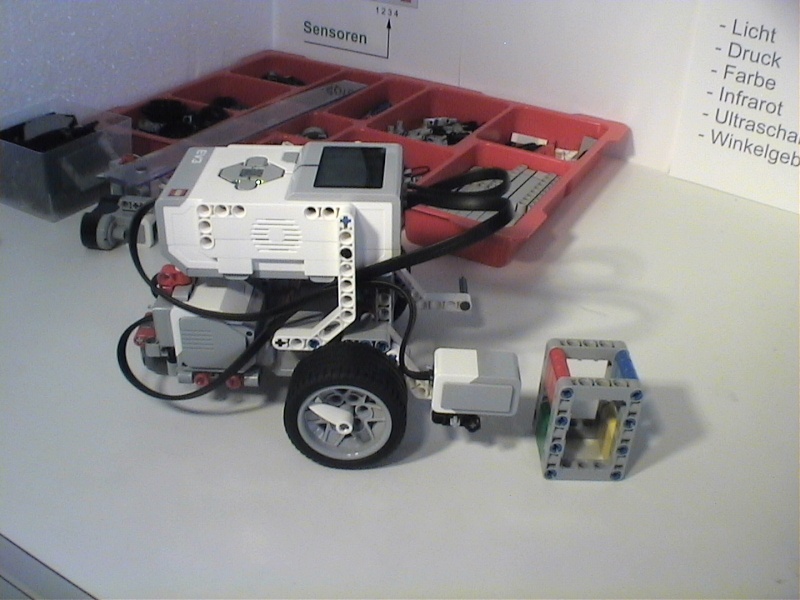
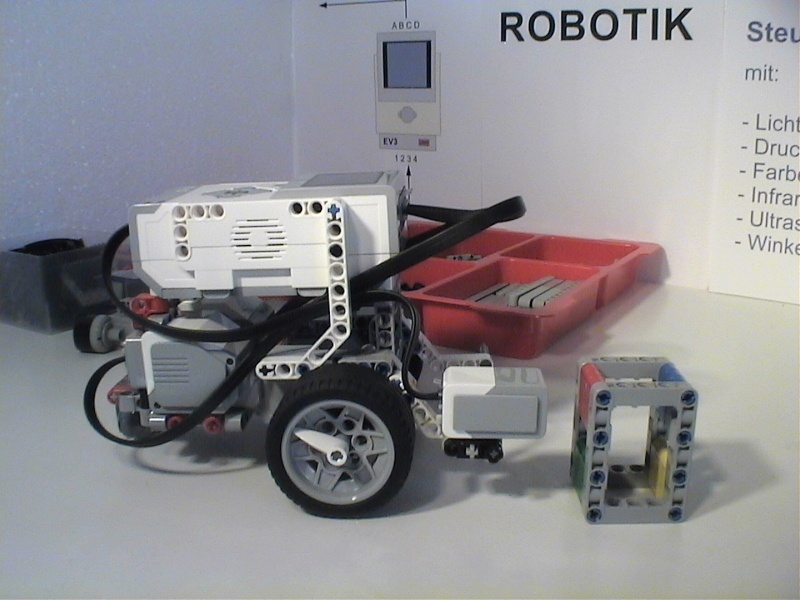
Das ist „puppy“ ein lieber Hund. Er hat 2 Motoren für seine Hinterbeine und einen Motor um den Kopf zu bewegen. Er kann Farben unterscheiden und ein weiterer Sensor wacht darüber, dass er sich die Hinterbeine nicht ausrenkt. **

Er ist aufgestanden und beschnuppert seinen „Farbknochen“. **

Er hat sogar ein Gesicht und stellt fest, dass der Knochen gelb ist. **

Hier ist er in Aktion und untersucht einen Farbknochen. **
 Der 3. Roboter
Der 3. Roboter
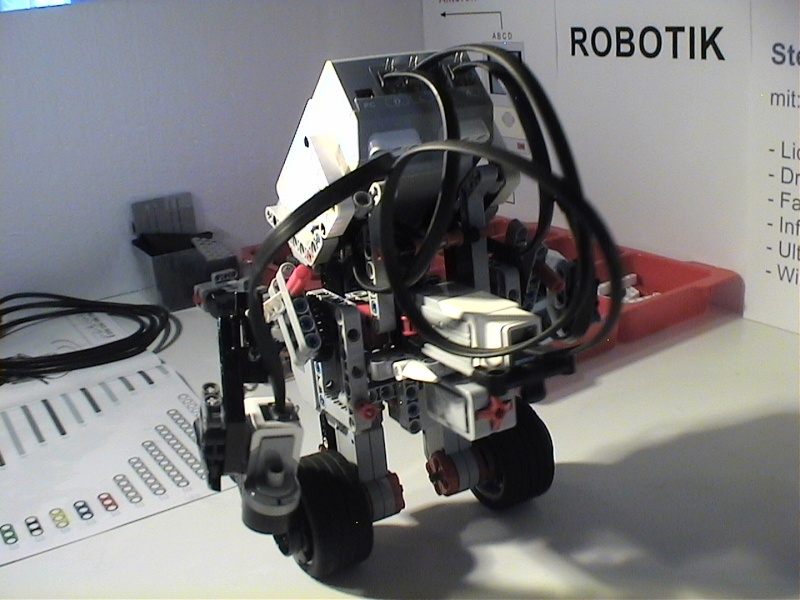
Das ist „gyroboy“, ein selbst balancierender Roboter. Er hat 2 Motoren um sich zu bewegen und einen weiteren Motor um zu balancieren. Zur Steuerung und Regelung dienen: Touch-, Farb-, Ultraschall- und Kreiselsensor.
Hier ist er noch nicht eingeschaltet und sitzt auf seinem Stuhl (balanciert noch nicht).

Ansicht von der Rückseite, immer noch nicht eingeschaltet.

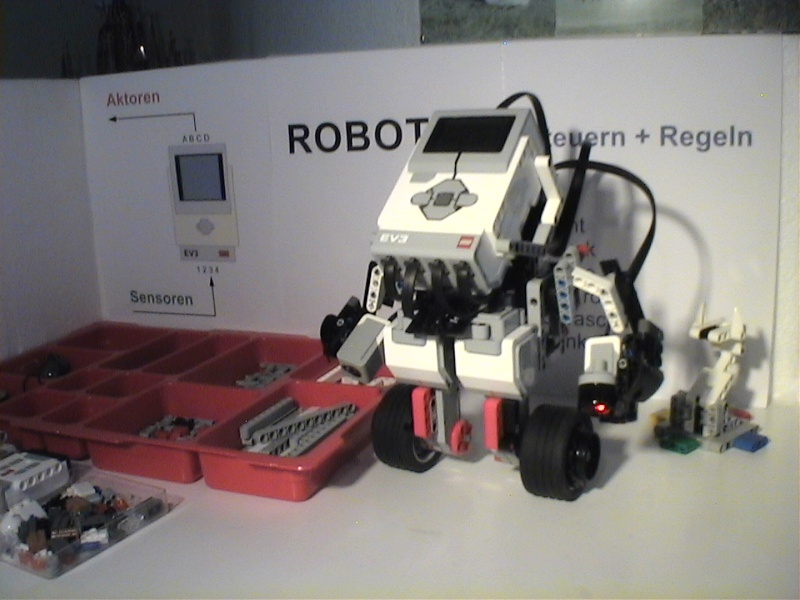
Nun ist der Stuhl weg und er muss selbst balancieren. ***
Er tanzt und hält sich im Gleichgewicht. ***

Als Beweis, er ist im Gleichgewicht, der Stuhl steht rechts unbenützt neben dem „gyroboy“. ***
 Der 4. Roboter
Der 4. Roboter
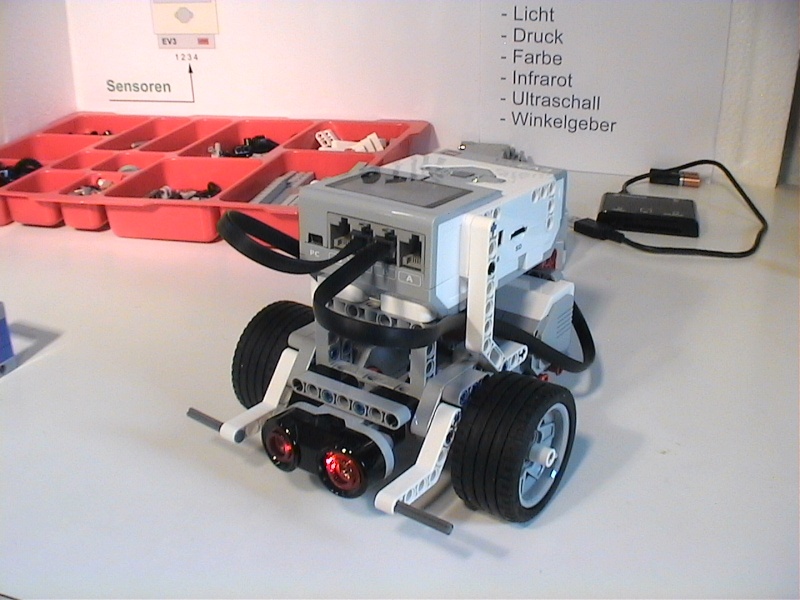
Das ist „balancer“, ein etwas abgespeckter gyroboy mit 2 Motoren und einem Kreiselsensor. Über den Infrarotsensor kann der Roboter mit der Fernsteuerung bewegt werden. Wenn er nicht eingeschaltet ist, bleibt er einfach liegen.

Jetzt ist er eingeschaltet, balanciert und bewegt sich ohne umzufallen – es ist wirklich sehr erstaunlich. ***
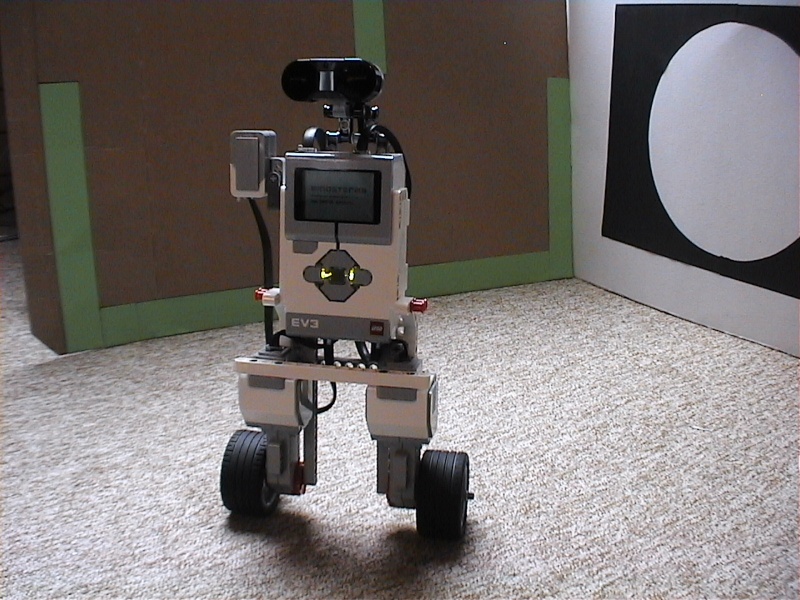
Auch ein schöner Rücken kann entzücken! ***
 Der 5. Roboter
Der 5. Roboter
Das ist eine Sortiermaschine und heisst „colorsorter“. Sie hat 2 Motoren und einen Touch- und einen Farbsensor.

Die Bausteinfarbe wird mit dem Farbsensor (Lichtpunkt rechts) eingelesen und vom Programm in einer Liste gespeichert. Die Bausteine müssen dann von Hand in die schräge Rampe (Bild Mitte) in der Einlese-Reihenfolge eingelegt werden. **

Sind alle acht Bausteine eingelesen fährt die Rampe an den Anschlag (Touchsensor) links. Nun liest das Programm die Bausteinfarbe aus der Liste und fährt die Rampe auf die zugehörige Sortierposition. Dort angekommen wird der genial konstruierte Auswerfmechanismus ausgelöst und der Baustein fällt in den Sortierbehälter. Die Rampe fährt zurück an den linken Anschlag. Dieser Vorgang wird wiederholt bis die Rampe leer ist. **

Zurück zum Anschlag. **

Die Rampe ist geleert. **

Die Sortierung hat funktioniert. **
 Der 6. Roboter
Der 6. Roboter
Das ist ein Kran, heisst „robotarm“ und hat 3 Motoren und 3 Sensoren. Der Kran wird mit der Fernsteuerung (am Bildrand vorn) bedient. Dies wäre auch direkt an der EV3 möglich. Die Fernsteuerung hat den Vorteil, dass bis 11 verschiedene Steuerbefehle möglich sind. Davon werden hier 8 Befehle benützt. **

Der Kran lässt sich um ca 200° drehen und in der Höhe verstellen. Die Drehbewegung ist bei der Linksdrehung durch einen Touchsensor begrenzt. Die Rechtsdrehung verlangt „Eigenverantwortung“! Die Höhenverstellung wird mit dem Lichtsensor begrenzt. Der Infrarotsensor wird für die Fernsteuerung benötigt. **
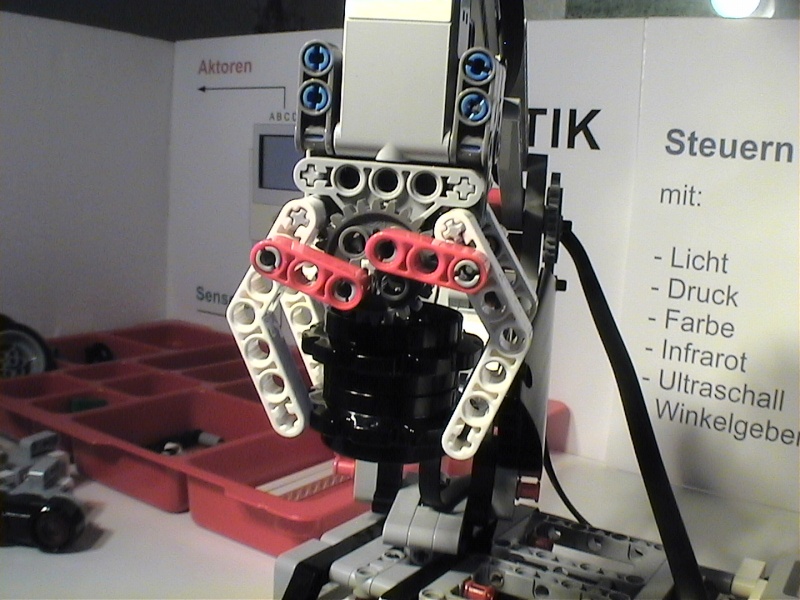
Der Greifer ist genial konstruiert und lässt sich durch den mittleren Motor mit viel Gefühl steuern. *
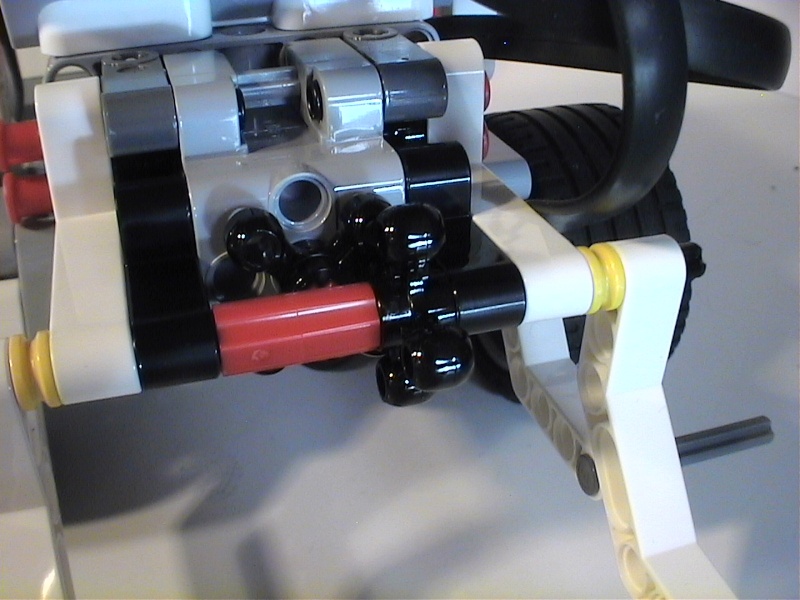
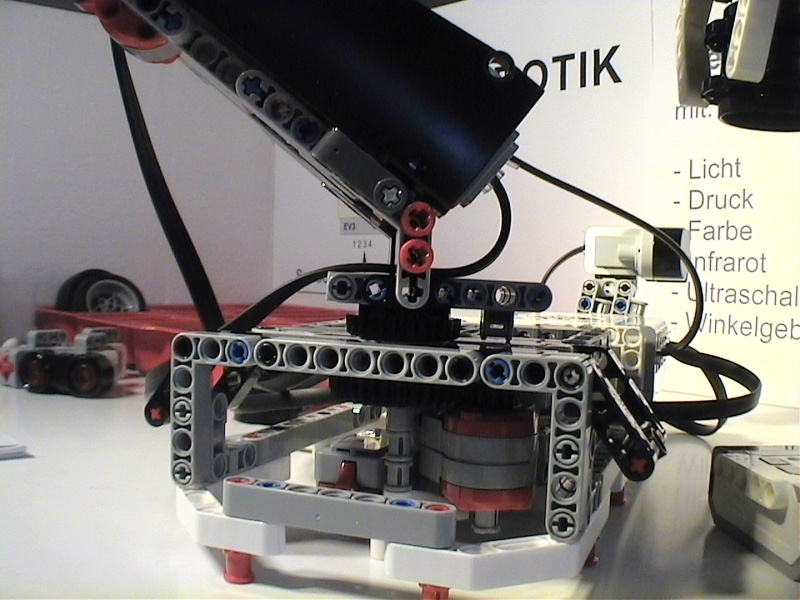
Beim Zusammenbau der Modelle kommt man immer wieder ins Staunen, wie raffiniert und mechanisch stark, die Bauteile eingesetzt werden. Hier eine Studie zu dieser Aussage:
Legende:
*
Die Programmierung mit „ms“-Blöcken wird am EV3 selbst vorgenommen.
**
Programmierung mit „Tigerjython“ am PC. Braucht Java + Tigerjython. Kabellose Datenübertragung mit Bluetooth. Wenn der PC noch nicht mit Bluetooth ausgerüstet ist kann man Bluetooth mit einem Bluetooth 4.0 USB-Dongle nachrüsten. Ist durchaus erschwinglich, gehört auch zu den … weitere Dinge …
***
Programmiert am PC mit „ms“-Programm und den „ms“-Blöcken, dieses Thema muss ich noch genauer studieren. Datenübertragung mit Bluetooth.
Wie geht es weiter?
• Ich habe mir das EPUB Buch: Scholz _Das-EV3-Roboter-Universum gekauft. Als … weitere Dinge … musste ich mich nach einem EPUB Reader umsehen und wurde fündig. Nun werde ich dieses Buch studieren und weitere Modelle bauen, meist „ms“-programmiert.
• Zum Basis Set gibt es einen Ergänzungsset, diesen habe ich bestellt und weitere 6 Modelle warten damit auf den Zusammenbau.
• Vielleicht baue ich demnächst auch eigene Kreationen, Ideen habe ich bereits.
Übrigens: MINDSTORMS sind Ideen in der Potenz
MINDSTORMS => Geistesstürme (auch Gedankenstürme)
Ich wünsche allen viele „Mindstorms“
Mit lieben Grüssen
alo



